Control Lab




Control System Lab consists of a number of computers together with simulation tools that allows students to simulate system responses, analyze stability, transient and steady-state behaviors of system and design cascade and feedback controllers to improve the system responses.
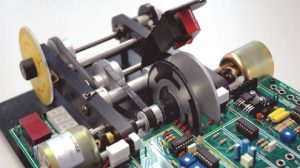
The lab has a number of motor control trainers that allow the user to perform numerous control experiments using either an analog or a digital controller. Drive of the motor system can be achieved by either using voltage input directly into the analog drive amplifier or by outputting a pulse width modulated waveform from a computer interface to the PWM demodulation circuitry. The lab has four sets of trainers in each of which the following components are being used.
System feedback is available in both analog and digital form. Analog feedback is provided by a tacho generator and a continuous rotation potentiometer. Digital feedback is generated by a Gray coded disc and a slotted disc. A digital tachometer display provides a constant read out of shaft speed, using data from the Gray coded disc. An eddy current braking system is fitted to the primary drive shaft, providing the user with three selectable loadings – off, half load, and full load. The final drive shaft from the DC motor is geared down at 9:1. A protractor disc is fitted on the final drive shaft, giving a visible indication of its position.